

Come scegliere gli ESC per droni FPV
Gli ESC (Electronic Speed Control) pilotano i motori brushless del drone e ne controllano la velocità. Sceglierli bene è essenziale per avere un quad fluido, affidabile e performante.
Come funziona un motore brushless
Sezione intitolata “Come funziona un motore brushless”I motori dei droni non si collegano direttamente a una fonte di tensione. Il rotore non ha avvolgimenti: ha magneti permanenti che si orientano seguendo il campo magnetico variabile generato dagli avvolgimenti sullo statore.

Quando la flight controller chiede di accelerare, l’ESC comanda la commutazione della corrente negli avvolgimenti, facendo “ruotare” il campo magnetico e quindi il motore.
Amperaggio: il parametro più importante
Sezione intitolata “Amperaggio: il parametro più importante”La prima cosa da valutare è l’assorbimento massimo in Ampere. Se l’assorbimento supera quello sopportato dall’ESC, si va incontro a surriscaldamento e rottura, e nei casi peggiori l’ESC può prendere fuoco in volo.
Incidono sull’assorbimento:
- la grandezza dei motori (diametro e altezza del rotore);
- motori con KV alti;
- eliche pesanti (diametro elevato e passo pronunciato).
Sugli ESC trovi due valori:
- assorbimento di picco (burst): il massimo sopportato per pochi secondi (~10 s);
- assorbimento continuo (continuous): la corrente erogabile a lungo senza problemi.
Come scegliere l’amperaggio giusto
Sezione intitolata “Come scegliere l’amperaggio giusto”Consulta le specifiche dei motori del costruttore per conoscere gli Ampere massimi, oppure i test pubblicati online. La regola pratica: prendi ESC leggermente sovradimensionati rispetto ai motori (es. motori da 25 A con ESC da 30 A). Sovradimensionare non crea problemi, costa solo un po’ di più e pesa un po’ di più.
Attenzione ai test e alle batterie
Sezione intitolata “Attenzione ai test e alle batterie”I test a banco mostrano spesso assorbimenti superiori a quelli reali in volo: muovere un’elica in aria pulita richiede meno sforzo che in aria turbolenta, e la FC non spinge mai i motori al 100% per tenere margine di stabilizzazione.
Anche la batteria è un limite. Esempio: 4 motori che a banco assorbirebbero 120 A, ma una LiPo 4S da 1300 mAh e 75C eroga circa 1,3 × 75 = ~98 A. Tienine conto quando dimensioni il setup.
Rumore elettrico
Sezione intitolata “Rumore elettrico”Camera, VTX, FC e ricevente hanno bisogno di un’alimentazione stabile e pulita. Il rumore elettrico (tensioni e correnti che variano rapidamente) si riconosce subito come disturbi nel video, soprattutto a tutto gas. I produttori lo limitano con i condensatori, ma “più condensatori” non significa automaticamente meno rumore. È un aspetto cruciale: può fare la differenza tra un quad fantastico e uno ingovernabile.
Firmware
Sezione intitolata “Firmware”Storicamente i firmware ESC erano due, SimonK e BLHeli; quest’ultimo è diventato lo standard. Oggi (2026) il panorama è questo:
- BLHeli_S (ESC 8 bit): ancora diffusissimo, ma il firmware originale è fermo. La community usa Bluejay, firmware open source che lo sostituisce e abilita DShot300 e il RPM filtering anche sull’8 bit.
- AM32: firmware open source per ESC a 32 bit, di fatto lo standard moderno dopo che BLHeli_32 (32 bit, codice chiuso) è stato dismesso.
- KISS / JESC: firmware proprietari per ESC specifici.
8 bit vs 32 bit
Sezione intitolata “8 bit vs 32 bit”Molti ESC economici usano ancora processori a 8 bit. I 32 bit (basati su STM32) hanno più potenza di calcolo e abilitano funzioni come telemetria, RPM filtering più efficiente e cambio del senso di rotazione via software. Per una build nuova performante, i 32 bit sono la scelta di riferimento.
Protocolli ESC
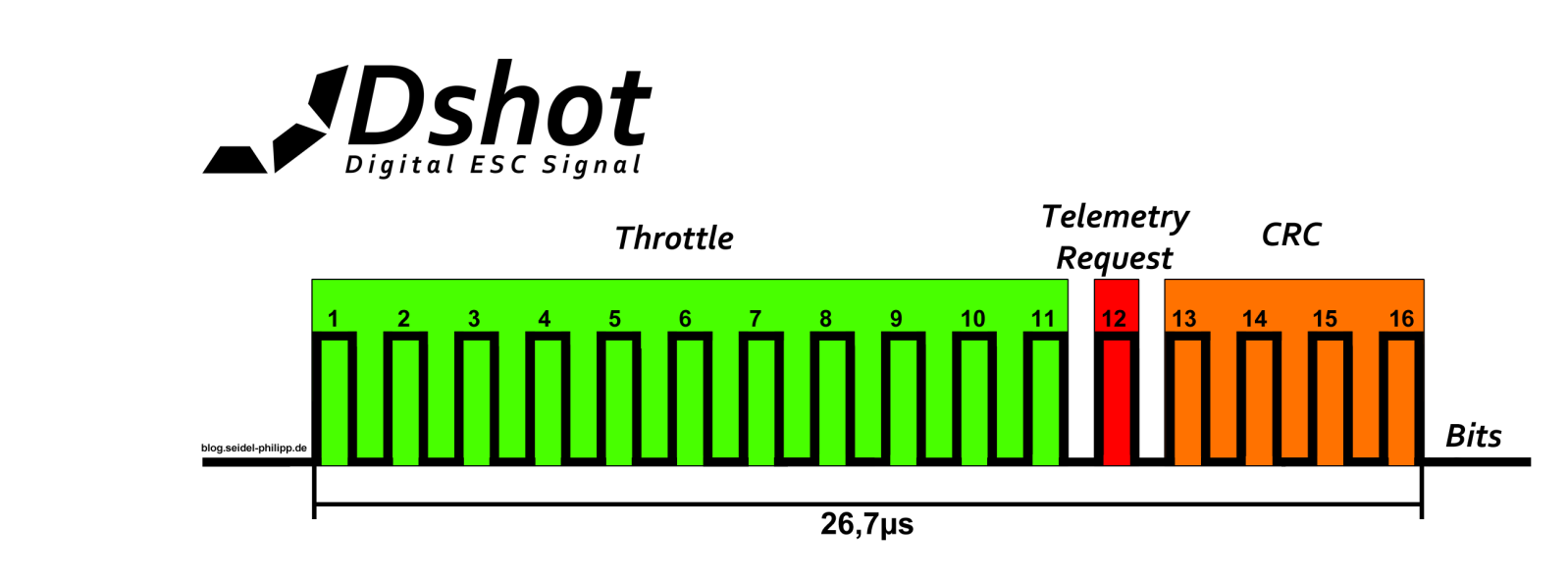
Sezione intitolata “Protocolli ESC”Il protocollo determina la velocità di dialogo tra FC ed ESC. Si è passati dal vecchio PWM (ritardo fino a 2 ms) ai protocolli digitali DShot, a latenza molto più bassa. Dal più vecchio al più recente:
- PWM standard
- Oneshot125 / Oneshot42
- Multishot
- DShot (DShot150, DShot300, DShot600, DShot1200)
- Proshot
Oggi lo standard è DShot300/DShot600, idealmente in versione bidirezionale (bidirectional DShot), che riporta gli RPM dei motori alla FC e abilita il RPM filtering: il filtraggio più importante introdotto in Betaflight negli ultimi anni. DShot1200 è ormai in disuso.
Tensione di ingresso (4S, 6S…)
Sezione intitolata “Tensione di ingresso (4S, 6S…)”Con la diffusione delle batterie 6S (22,2 V) sono usciti ESC che reggono questa tensione. Verifica sempre il voltaggio massimo: usare una 6S su un sistema pensato per 4S brucia tutto.
Con o senza BEC (ESC “Opto”)
Sezione intitolata “Con o senza BEC (ESC “Opto”)”Alcuni ESC hanno un BEC integrato che fornisce 5 V per alimentare FC, RX e altri componenti. Quelli senza BEC si chiamano spesso Opto: usano un optoisolatore che separa il circuito di potenza da quello di segnale, riducendo il rumore. Gli Opto sono più leggeri e piccoli, ma richiedono un’alimentazione 5 V separata.
Collegare l’ESC al motore
Sezione intitolata “Collegare l’ESC al motore”L’ordine dei tre fili del motore non conta: salda i tre cavi come ti è comodo. Se il motore gira nel verso sbagliato, basta invertire due fili qualsiasi, oppure cambiare il senso di rotazione via software (nella suite del firmware).
ESC 4-in-1
Sezione intitolata “ESC 4-in-1”I 4-in-1 integrano quattro ESC su una sola scheda, della dimensione di una FC, da impilare nello stack: cablaggio molto più pulito e peso centralizzato (migliore reattività). Lo svantaggio: se si rompe un canale, spesso va sostituita l’intera scheda. Oggi sono la soluzione più diffusa nelle build 5”.
Quali ESC scegliere
Sezione intitolata “Quali ESC scegliere”Per un 5” moderno punta a un 4-in-1 da 45-60 A, 32 bit (AM32), abbinato a uno stack con la FC. Verifica sempre voltaggio (4S/6S) e amperaggio rispetto ai tuoi motori, seguendo i criteri qui sopra.
Questo sito contiene link affiliati: acquistando tramite questi link FPV Italia può ricevere una piccola commissione, senza alcun costo aggiuntivo per te.