Come utilizzare batterie 6s con motori 4s


Grazie alle nuove funzionalità di Betaflight disponibili dalla 4.0 in poi è possibile utilizzare batterie 6s su build con motori 4s senza bruciarli, a patto che l'elettronica installata sul drone riesca a supportare voltaggi più elevati.
Questo significa che qualsiasi componente (ESC, FC, VTX, CAM, GPS) collegato direttamente alla batteria deve essere in grado di funzionare ad un voltaggio superiore a 25V, pena instantanea rottura. Motori Esclusi
FPV Italia e tutto lo staff non sono responsabili dell'uso improprio di questa guida, di danni o errori commessi da terzi.
Ricavare il Motor Output Limit
I kv dei motori possono essere "convertiti" tramite la funzione "motor_output_limit" che va a limitare gli ampere erogati ai motori, permettendoci cosi di utilizzarli a voltaggi superiori.
Ad esempio possiamo trasformare motori da 2400kv in motori da 1750kv.
Per prima cosa procuriamoci il valore limite da impostare tramite questa semplice formula matematica:
(kv_desiderati * 100) / kv_attuali = Output_limit
Arrotondiamo il risultato, in modo da non avere cifre decimali e mettiamolo da parte, ci servirà tra poco.
Aumentare il Max' cell voltage, Importante!
In Betaflight nel Tab Power & Battery, impostiamo il "Maximum Cell Voltage" a 4.4V, questo per permettere a BetaFlight di avere un maggior range di lettura ed evitare che una 6s mezza scarica sia riconosciuta come una 4s o viceversa.
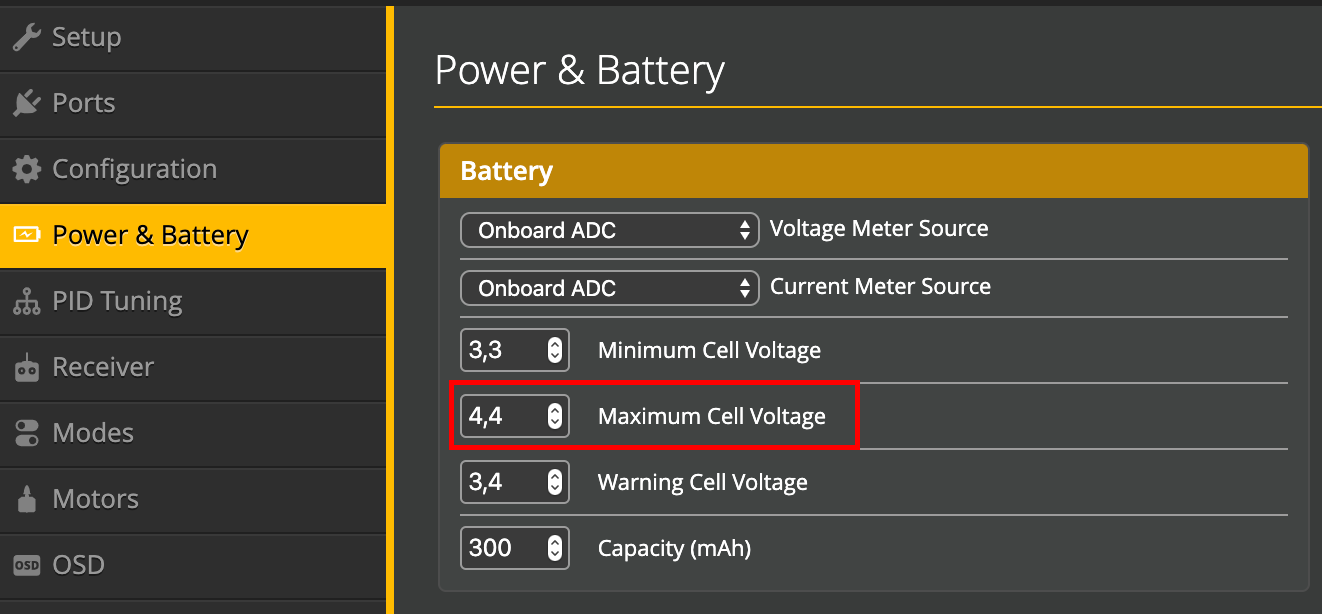
Ricordate di salvare le modifiche con il tasto SAVE
Preparare i Profili dei PID
Nel Tab PID Tuning copiate il profilo che utilizzate con i vostri pid sugli altri 2 profili, in modo da avere tutti e 3 i profili uguali, ( li potete modificare successivamente)
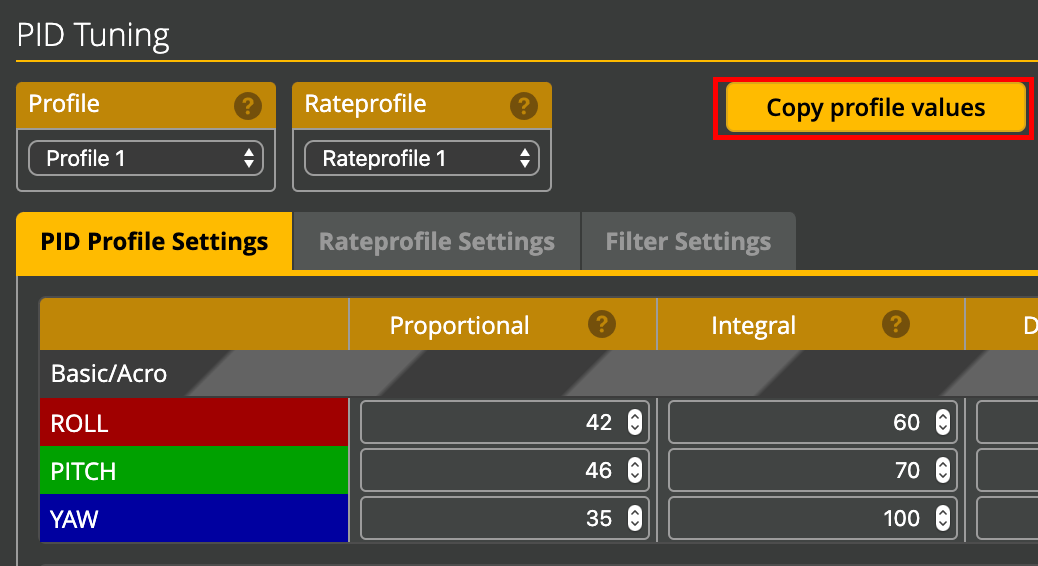
Per effettuare l'operazione basta cliccare su Copy profiles Values e selezionare il profilo di destinazione.
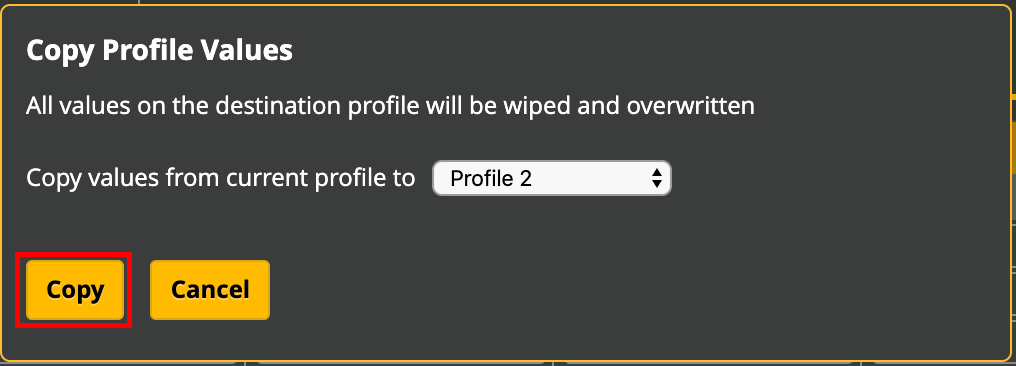
Finita questa operazione avremo i 3 profili PID disponibili tutti uguali, adesso non ci resta che impostare tramite la CLI un paio di parametri per permettere a Betaflight di riconoscere in automatico il tipo di batteria collegata e selezionare in automatico il profilo corretto.
Ricordate di salvare le modifiche con il tasto SAVE
Impostazioni tramite la CLI
Quello che andremo a fare è avere il Profilo 1 impostato per batterie 4s senza nessuno output limiter, il Profilo 2 impostato per le 6s con l'output limiter e il profilo 3 come "controllore", cioè il drone si sposta in automatico dal profilo 3 al profilo 1 o 2 a seconda della batteria che collegate.
Piccola premessa: nella CLI i profili sono numerati partendo da 0, cioè il profilo 1 sarebbe il profilo ZERO | il profilo 2 = profilo 1 | e profilo 2 = profilo 3, è leggermente contro intuitivo ma funziona così.
Per prima cosa selezionate il profilo 1 dando il comando:
Profile 0
adesso impostate il numero di celle del profilo tramite il comando:
Set auto_profile_cell_count = 4
Adesso ci spostiamo nel profilo 2 e impostiamo il numero di celle e l'output limiter con il valore che abbiamo trovato in precedenza dando in successione i comandi:
Profile 1
Set auto_profile_cell_count = 6
Set motor_output_limit = 73 <---- questo è il valore trovato con la formula!
Nell'esempio sovrastante 73 è il valore arrotondato trovato con la formula nel primo passaggio, se voi avete motori diversi probabilmente sarà diverso.
Spostiamoci nel profilo 3 e impostiamolo come "controllore":
Profile 2
Set auto_profile_cell_count = -1
Salvare le modifiche
A questo punto non dimenticate di salvare le modifiche dando il comando:
save
Controlliamo il corretto funzionamento
Per essere certi di aver impostato tutto correttamente vi basterà collegare il drone a Betaflight e andare nella Tab PID Tuning. Vedrete che il profilo selezionato sarà il 3, adesso collegando una batteria 6s vedrete il profilo switchare in automatico in Profilo 2 ( che è quello con il limitatore), invece se collegate una 4s ( dovete disconnettervi e riconnettervi da BF ) si sposta su Profilo 1.
Perfetto! Siete pronti a volare!
⚠️ FIXATO! ATTENZIONE AI BUG!
(RISOLTO)
Attualmente esiste un Bug che aggira il motor output limit quando utilizzate la funzione flip_over_after_crash (turtle mode) erogando cosi ai motori la massima potenza. Vi consigliamo di evitare di utilizzare questa funzione quando volate a 6S per non rischiare di bruciare gli avvolgimenti o gli ESC.
 betaflight
betaflightil Bug è stato risolto.