Come scegliere gli ESC per Droni FPV Racing e Quadricotteri
Gli ESC servono per pilotare i motori brushless dei droni e controllarne la velocità. Scegliere gli ESC giusti è essenziale per avere un drone fluido e performante. In questa guida vediamo come fare.

Tra i componenti fondamentali per assemblare un drone FPV ci sono gli "ESC" acronimo di Electronic Speed Control, come suggerisce il nome servono per pilotare i motori brushless e controllarne la velocità.
I motori equipaggianti sulla maggior parte dei droni non possono essere collegati direttamente ad una fonte di tensione per metterli in rotazione in quanto il rotore è privo di avvolgimento ed è invece dotato di magneti permanenti, che si orientano sequenzialmente lungo il campo magnetico variabile generato dagli avvolgimenti sullo statore.

Per realizzare la rotazione del campo magnetico generato nello statore, alla ricezione del "segnale" di accelerare dalla flight controller, l' ESC controlla la commutazione della corrente, comandando così l'inversione di corrente e quindi la rotazione del campo magnetico negli avvolgimenti.
Amperaggio
La prima cosa da tenere i considerazione quando si sceglie un ESC è l'assorbimento massimo, che viene misurato in Ampere. I motori assorbono corrente dalla batteria per girare, se l'assorbimento è maggiore di quello sopportato dagli ESC si va in contro a surriscaldamento e subito dopo alla rottura dell' ESC stesso.
Se il calore è eccessivo l'ESC può anche prendere fuoco mentre siete in volo!!!
Ciò che incide maggiormente sull' assorbimento è:
- La grandezza dei motori (altezza e diametro del rotore)
- Motori con alti KV
- Eliche pesanti (diametro elevato e passo pronunciato)
Normalmente sugli ESC sono riportati 2 valori per indicare l'assorbimento sopportato: Assorbimento di picco (burst) e l'assorbimento in continua indicato spesso con (continuous current rating) che specifica quanta corrente possono erogare gli ESC per lunghi periodi di tempo senza problemi. D' altro canto il burst indica l'assorbimento massimo sopportato per tempi molto brevi (~10 sec).
Come scegliere il corretto Amperaggio e ESC sovradimensionati
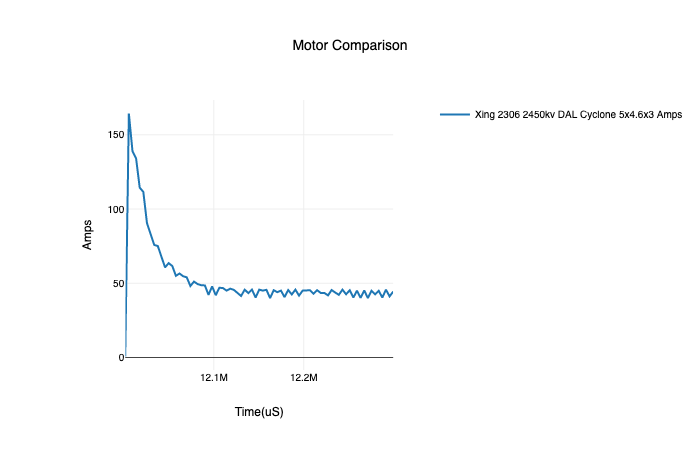
Per scegliere l'Amperaggio corretto bisogna consultare le specifiche tecniche dei motori (che stiamo utilizzando o vorremmo utilizzare) fornite dal costruttore per conoscere gli Ampere massimi assorbiti, possiamo anche misurare autonomamente gli assorbimenti tramite attrezzatura da banco o più semplicemente consultare online i test effettuati da altri.
Molto spesso i principianti credono erroneamente che gli "Ampere" degli ESC siano poi gli Ampere applicati ai motori, questo è falso in quanto i motori durante il volo assorbono gli ampere che necessitano in quel momento, dettati dalle loro caratteristiche tecniche, dai fattori indicati prima e dai giri/minuto richiesti, gli ESC devono solo essere in grado di "sopportare" gli Ampere richiesti, quindi è bene conoscere questi valori così da non cadere nell'errore di comprare ESC da 60A per motori che ne richiedono meno della metà al 100% di throttle.
Utilizzare ESC sovradimensionati non comporta nessuno problema se non un maggior costo e un maggior peso degli stessi, è quindi consigliabile utilizzare esc leggermente sovradimensionati da abbinare ai vostri motori, ad esempio motori da 25A -> ESC da 30A ecc.
Sovrastime dei Test
Una cosa da tenere a mente è che i test effettuati a banco molto spesso mostrano assorbimenti superiori a quelli effettivi che si avrebbero durante il volo, in quanto muovere un' elica in aria "pulita" richiede meno sforzo dei motori e quindi meno corrente assorbita rispetto a muoverla in un volume d'aria ricco di turbolenze.
Anche la FC limita in parte l'assorbimento in quanto non spinge mai tutti i motori al 100% delle loro possibilità, questo per mantenere un certo margine di giri necessari per stabilizzare il drone.
Il limite delle batterie
Le batterie rappresentano un altro limite dato che le loro prestazioni variano nel tempo durante il volo e incidono sulla corrente massima assorbibile.
Infatti se per esempio utilizziamo 4 motori da 30A che dovrebbero assorbire quindi 120A e una buona batteria 4S da 1550mA e 75C facendo rapidamente due conti notiamo che la batteria ne riesce ad erogare solo 1,55A*75 = 116A.
Quindi è bene tener conto anche delle caratteristiche delle batterie disponibili quando si vanno a scegliere gli ESC.
Rumore
Il rumore elettrico è una cosa abbastanza complicata da spiegare ma la sua presenza è facilmente riconoscibile dalla qualità del video che riceviamo, infatti la telecamera, la VTX, la FC e la ricevente necessitano di una tensione di ingresso molto stabile e pulita (senza rumore) per operare al meglio altrimenti noteremo subito fastidiose interferenze nel video, specialmente quando diamo il 100% di throttle.

Il rumore è causato da tensioni, correnti e frequenze che variano rapidamente in un circuito elettrico, anche un motore che funziona in modo regolare può causare queste fluttuazioni. I produttori cercano di arginare questo problema installando sugli ESC svariati condensatori per filtrare il rumore, ma non sempre un ESC con tanti condensatori è sinonimo di basso rumore.
Il problema del rumore è assolutamente cruciale, può significare la differenza tra un fantastico mini quad FPV e qualcosa che è completamente inguidabile.
Firmware
I Due firmware per ESC sono SimonK e BLHeli. Inizialmente erano entrambi open source, sviluppati e gestiti da appassionati di RC. Ai tempi, i firmwares scritti dai produttori di ESC non erano stabili e ben fatti, quindi gli appassionati tendevano a flashare SimonK o BLHeli sui loro ESC. Quest'ultimo lentamente divenne il firmware standard e la maggior parte degli ESC oggi in commercio arrivava con il firmware BLHeli preinstallato.
BLHeli_S
Il firmware BLHeli_S è la seconda generazione del firmware BLHeli, sviluppato appositamente per gli ESC che dispongono di processori Busybee con PWM.
È disponibile un'interfaccia utente molto intuitiva per la programmazione.
BLHeli_32
Il firmware ESC BLHeli_32 è la terza e più recente generazione di BLHeli. È scritto specificamente per ESC a 32 bit, ma purtroppo è diventato a sorgente chiuso. Questi processori più potenti consentono prestazioni più fluide, più precise e affidabili rispetto ai precedenti ESC.
KISS ESC Firmware
Il firmware KISS ESC è anch'esso a sorgente chiuso e disponibile esclusivamente per ESC della serie KISS prodotti dalla Flyduino
8bit vs 32bit
Molti ESC utilizzano ancora oggi processori a 8 bit (F330, F39X, Busybee ecc.), Ma dal 2016 hanno iniziato a emergere alcuni ESC a 32 bit basati su STM32, come KISS 24A Race Edition ,V-Good Firefly e Gemfan Maverick. Questi potenti processori a 32 bit abbinati ai nuovi firmwares sbloccano molte nuove funzionalità che non erano possibili con la scarsa potenza di elaborazione dell'MCU a 8bit. Funzionalità come "la telemetria" o il "cambio di direzione di rotazione dei motori all'avvio" - per citarne solo alcune.
Protocolli ESC
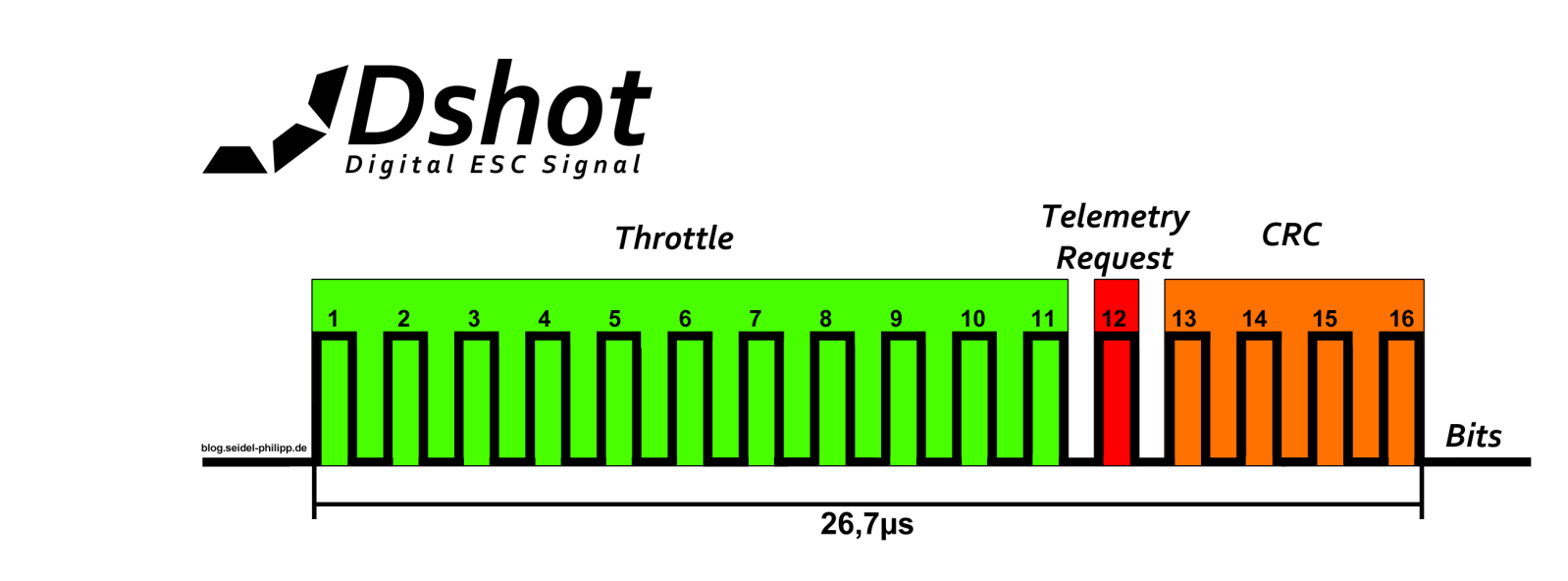
Il protocollo ESC determina la velocità con cui i segnali possono essere scambiati tra FC e ESC, il che può avere un grande impatto sulle prestazioni del quadricottero. Il protocollo originale (più vecchio) è PWM standard, ha un ritardo fino a 2ms, mentre il Dshot attualmente più veloce ha ridotto la latenza fino a circa 5-26uS.
Ecco un elenco degli attuali protocolli disponibili utilizzati sui quadricotteri, dal più vecchio al più recente:
- PWM standard
- Oneshot125
- Oneshot42
- Multishot
- DShot (DShot150, DShot300, DShot600, DShot1200)
- Proshot
Tensione di ingresso
Con la diffusione delle batterie 6S - 22.2V sono usciti nuovi ESC in grado di sopportare questa tensione di ingresso, state ben attenti a non utilizzare una batteria 6S su un sistema 4S altrimenti brucerete tutto.

Con o senza BEC - Opto ESC
Alcuni ESC sono dotati di un BEC incorporato (circuito di eliminazione della batteria) che emette 5 V (che è possibile utilizzare per alimentare il controller di volo, RX e altri componenti). Quelli che non hanno un BEC incorporato, sono spesso definiti ESC "Opto" dagli esperti di marketing e dai produttori, nonostante questa affermazione, tuttavia, potrebbero non utilizzare effettivamente gli optoisolatori.
Un optoisolatore è un componente ottico che trasferisce i segnali usando la luce. In sostanza separa il circuito ad alta tensione dal circuito a bassa tensione e impedisce che le tensione in rapida evoluzione danneggi l'elettronica o interferisca con i segnali dall'FC.
Gli ESC che non hanno un BEC hanno il vantaggio di essere più leggeri, più piccoli e meno rumorosi (poiché il circuito di controllo del motore è isolato otticamente dal ricevitore radio e dal controller di volo).
Connettere l'ESC al motore
Una cosa che può confondere i novizi è l'ordine in cui saldare i 3 fili dei motori agli ESC, non preoccuparti dell'ordine, salda semplicemente i tre fili su un'estremità dell'ESC nell'ordine che preferisci. Se il motore gira nella direzione sbagliata, è sufficiente invertire l'ordine di due fili. È inoltre possibile modificare l'impostazione della direzione di rotazione in BLHeliSuite (se si utilizza questo firmware). Per gli utenti KISS, ci sono 2 piazzole che è possibile cortocircuitare per invertire la rotazione del motore.
ESC 4in1
Un'opzione conveniente sono gli ESC 4 in 1, che in pratica sono quattro ESC integrati in una singola scheda della stessa dimensione di un FC o PDB, che è possibile impilare insieme, ripulendo il cablaggio. Tuttavia, il danneggiamento di un singolo ESC implica la sostituzione dell'intera scheda. Questo è un compromesso tra rischio e convenienza.
Un ESC 4 in 1 ha anche vantaggi in termini di distribuzione del peso sull'aeromobile, poiché la massa è più centralizzata e il momento di inerzia del mini quad è minore, il che dovrebbe migliorare la reattività.
Quali ESC vi consigliamo?
Per rispondere a questa domanda consulta la nostra guida: